The KX family of robots have been automating all areas of science over the last 30 years. Peak robotics have an extensive list of different finger variants to accommodate the most challenging of applications. If you have an application which is not compatible with the finger options below please get in touch with us for further assistance
Grippers
The grippers are the part of the robot that enables the picking and placing of objects. When combined with a collaborative robot arm (e.g. the KX-2), grippers enable the automation of key laboratory processes. The gripper is optimized for handling common labware such as microplates, regent reservoirs, tip racks and Petri dishes. These objects can be with or without lids.
Gripper housing can also be fitted with additional feedback systems, contact us for further information. The Peak Robotics, Inc. KX-2 has plate detection and a barcode reader fitted as standard.
Plate detector Barcode reader
Fingers
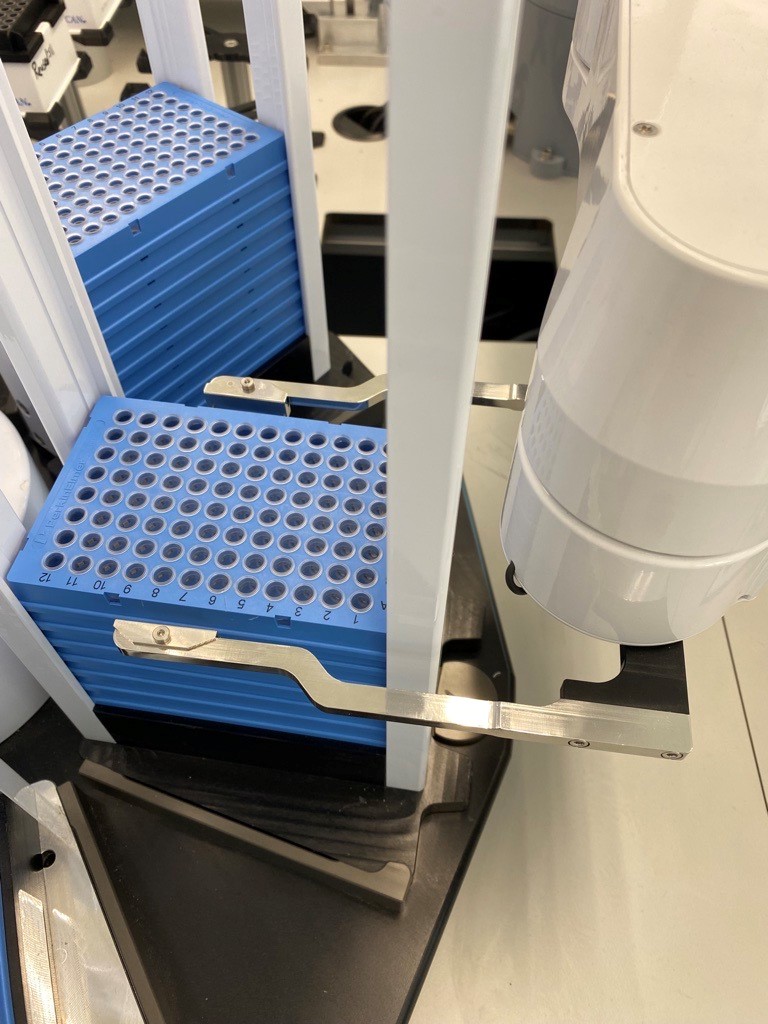
Fingers can come in a range of lengths & drop configurations. The extended drop fingers are used to access instruments with limited Z height to manoeuvre the plate into position.
Fingers can come in a range of lengths & drop configurations.
The extended drop fingers are used to access instruments with limited Z height to manoeuvre the plate into position.
Petri dish fingers Extended, drop fingers
The petri dish shape requires a specific finger format and rack configuration to pick and place the dishes.
Custom labware fingers for common tube types are also available.
NMR
Loading a Nuclear Magnetic Resonance (NMR) spectrometer with a glass sample tube requires a great deal of precision with a very delicate touch. The KX2 robot with the custom-designed fingers is used to pick up 3 mm glass NMR tubes from a rack and insert them into the spinner.
Then place the spinner in the NMR magnet.
Upon data acquisition completion the robot retrieves the spinner from the NMR magnet, removes the tube from the spinner and then places the tube back into the rack.
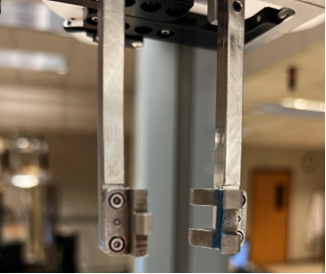
The fingers are designed with: Adjustments allowed in the X and Y.
One jaw is flat and slightly loose allowing it to align to the tube to reduce the chance of the glass tube breaking.
Both jaws are coated with a thin layer of silicone to enhance the grip on the tube to allow insertion of the tube into the tight-fitting spinner without the jaws slipping down the tube.
Use left/right arrows to navigate the slideshow or swipe left/right if using a mobile device
choosing a selection results in a full page refresh
press the space key then arrow keys to make a selection