Summary:
For flexible, safe and reliable laboratory automation, look no further than the innovative KX2 collaborative laboratory robot from Peak Robotics.
The KX2 offers continuous 360 degree rotation on the shoulder and wrist axes, providing process optimization and increased throughput.
The full enclosure design makes it intrinsically safe and proven Peak technology delivers reliable performance for all your automation needs.
Included Accessories:
- Top Grip Finger Set
- Side Grip Finger Set
- Teach Plate
Warranty:
Features
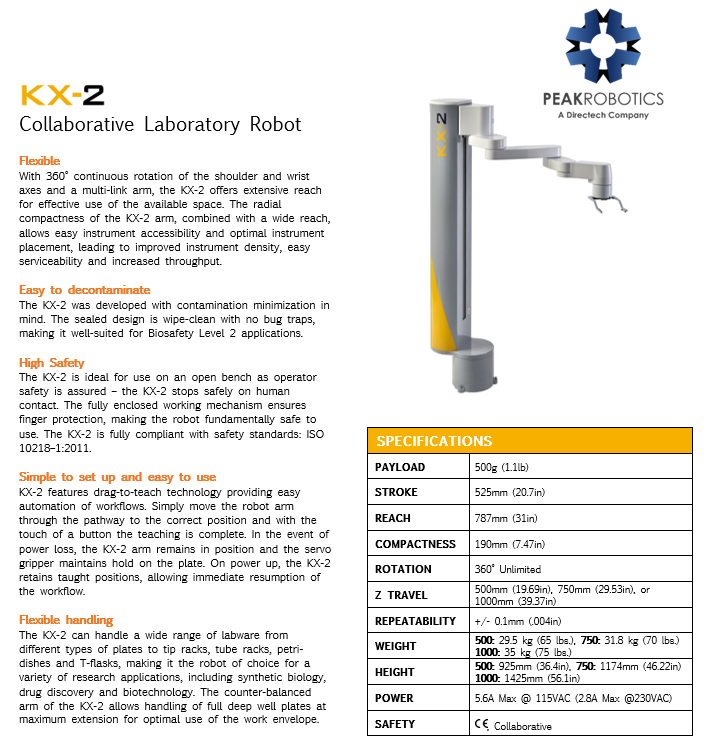
Flexible
With 360° continuous rotation of the shoulder and wrist axes and a multi-link arm, the KX2 offers extensive reach for effective use of the available space. The radial compactness of the KX2 arm, combined with a wide reach, allows easy instrument accessibility and optimal instrument placement, leading to improved instrument density, easy serviceability and increased throughput.
Easy to decontaminate
The KX2 was developed with contamination minimization in mind. The sealed design is wipe-clean with no bug traps, making it well-suited for Biosafety Level 2 applications.
High Safety
The KX2 is ideal for use on an open bench as operator safety is assured – the KX2 stops safely on human contact. The fully enclosed working mechanism ensures finger protection, making the robot fundamentally safe to use. The KX2 is fully compliant with safety standards: ISO 10218–1:2011.
Simple to set up and easy to use
KX2 features drag-to-teach technology providing easy automation of workflows. Simply move the robot arm through the pathway to the correct position and with the touch of a button the teaching is complete. In the event of power loss, the KX2 arm remains in position and the servo gripper maintains hold on the plate. On power up, the KX2 retains taught positions, allowing immediate resumption of the workflow.
Flexible handling
The KX2 can handle a wide range of labware from different types of plates to tip racks, tube racks, petri-dishes and T-flasks, making it the robot of choice for a variety of research applications, including synthetic biology, drug discovery and biotechnology. The counter-balanced arm of the KX2 allows handling of full deep well plates at maximum extension for optimal use of the work envelope.
Specifications
Product Name: KX2-500
Max Payload: 500g (1.1lb)
Radial Stroke: 525 mm (20.7in)
Radial Reach: 787mm (31in) w/Side-Grip Fingers, 677mm (26.6in) to Wrist Center
Radial Compactness: 190mm (7.47in) with Gripper Facing Inward
Travel:
Shoulder: 360° Unlimited
Z: 500mm (19.69in)
Elbow: 525mm (20.7in)
Wrist: 360° Unlimited
Gripper: 26.15mm (1.03in) per finger
Speed (Max):
Shoulder: 145 deg/s
Z: 750 mm/s (29.5 in/sec)
Elbow: 467 mm/s (18.4 in/sec) avg.
Wrist: 500 deg/s
Gripper: 47 mm/s (1.85 in/sec)
Torque/Thrust:
Shoulder: 14.5Nm (128 in-lb) Peak, 7.3Nm (64 in-lb) Continuous
Z: 43.3N (9.7 lbs) Peak, 21.7N (4.9 lbs) Continuous
Elbow: 11.3Nm (100 in-lb) Peak, 5.7Nm (50 in-lb) Continuous
Wrist: 1.22Nm (10.8 in-lb) Peak, 0.61Nm (5.4 in-lb) Continuous
Gripper: 22N (5 lbs)
Encoder Resolution:
Shoulder: 8,388,608 counts/revolution
Z: 3,998 counts/mm
Elbow: 13,375 counts/mm avg.
Wrist: 16,384 counts/revolution
Gripper: 3,183 counts/mm (motion of single finger)
Repeatability:
Arm Extend: +/- 0.1mm (.004in)
Vertical: +/- 0.1mm (.004in)
Weight: 29.5 kg (65 lbs)
Height: 925mm (36.4in)
Power:
Input Power: 100-240 VAC), 1Φ, 47-63Hz, 5.6A Max @ 115VAC (2.8A Max @ 230VAC)
Output to Robot: 57VDC/5.3A/300W Max, 24VDC/3A/80W Max
Power Supply Dims: 240mm x 160mm x 90mm (9.5in x 6.3in x 3.5in)
Safety: Current & Position Error Sensing, Emergency Stop Button (Stop Cat. 1)
User I/O: 3 Digital Inputs, 2 Analog Inputs, 3 Digital Outputs
Encoders: Magnetic Absolute on robot joints, Incremental on gripper
Teaching: Drag-to-teach-point, one-touch teach button on robot, game controller (Teach Plate is included).
Gripper Options: Top-Grip (included), Side-Grip (included), Side-Grip-Portrait-Jog, Custom
PC Interface: USB 2.0